Mapping of groundwater is essential in planning of water resources development, use, and management. The knowhow of potential distribution of available groundwater bodies is hence vital here. The mapping of amount of permanent water resources in aquifers can produce the groundwater potential distribution. Remote sensing and geographic information system (GIS) in combination with vertical electrical sounding (VES) can be applied for groundwater zoning and validation.
1. Derivation of contributing factors
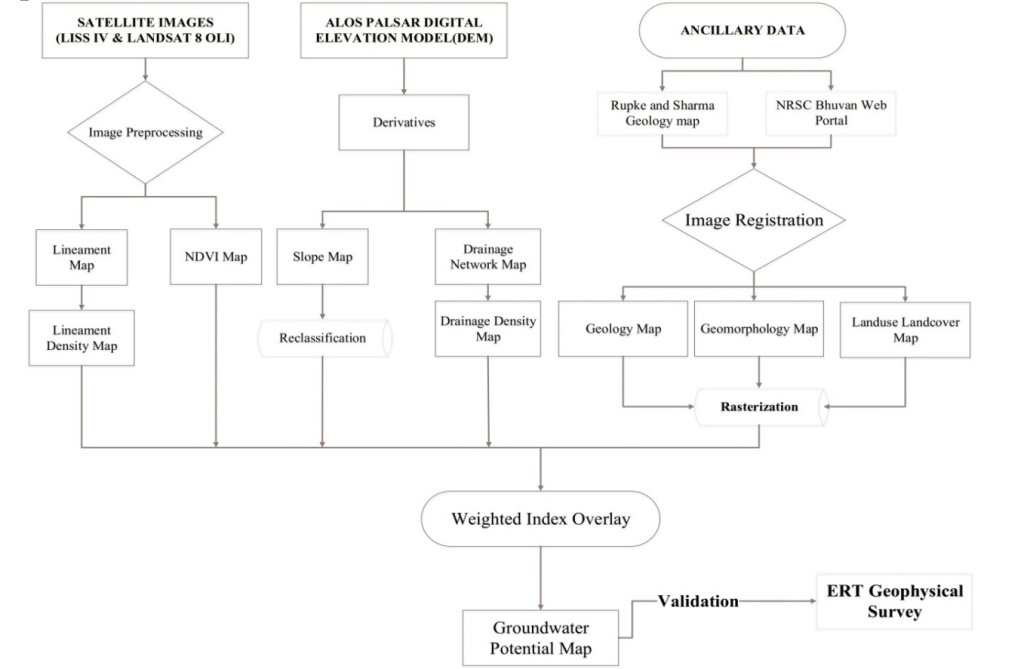
For groundwater prospect zoning, parameters such as; geology (GE), geomorphology (GM), land use land cover (LULC), lineament (LI), slope (SL), drainage (DD), and normalized difference vegetation index (NDVI) has to be considered. These parameters can be derived from satellite images, ancillary data, and field studies. GE maps can be collected from government agency, while GM, DD and SL can be derived from digital elevation model (DEM). However, the print of geology map has to be geo-referenced and digitized. Further, LULC and NDVI can be generated from satellites images using multi-spectral bands of optical remote sensing.
Geology and Geomorphology
Geology of the area provides hint in groundwater distribution. The groundwater distribution depends on the type of subsurface lithology and underlying geological structure. If the area has major geological structure such as fracture, faults, and outcrops etc., which intrudes the groundwater flow and helps in storing the water percolated from surface.Similarly, geomorphological features of any region determine the types of landform and the process that control the movement of groundwater.
Drainage and Lineament Density (km/km2)
Drainage Density is defined as the ratio of total length of all the streams within the basin to the total area of basin. Higher the drainage density, lesser the infiltration and more prominent to runoff and vise-versa. Similarly, lineament is outcome of visual interpretation of satellite images where curvilinear and linear appearances can be delineation. It shows anomalies of subsurface lithographical structure, outcrops, ridges etc. Higher the lineament density provides greater storage capability through secondary porosity.
LULC and NDVI
LULC is an essential indicator for the management of natural resources and groundwater extent. NDVI is calculated using Near Infrared (NIR) and red (R) bands of multi-spectral images of optical remote sensing. NDVI = (NIR-R)/(NIR+R). The values of NDVI range from -1 to +1 in which -1 to 0 indicate barren land with infrastructural developmental activities in the region. Water bodies lies in mid values around zero. Values from +0.5 to +0.8 represent the green land which indicate the presence of groundwater.
Slope and Topography
The slope gives the hydro-geological characteristic of the groundwater. Higher the slope angles, more prominent to surface runoff and less time for the surface water and precipitation to infiltrate through subsurface. Topography with more ruggedness and gentle slopes can have different water storage capacities. Here, an earthquake can change the topography and hence the distribution of ground water.
2. Ground Water Potential Index (GWPI)
The weighted overlay technique, which is frequently used in GIS, and can be applied to determine the GWPI. The method is the straightforward combination different type of thematic layers (parameters as defined above). This algorithm considers the importance and effectiveness of individual thematic layers for the generation of potential map.
There are numerous weighting techniques like analytical hierarchical process (AHP), regression models, and indexing methods to determine individual weights of sub-class to reduce human bias. Similarly, ratings are provided to sub-classes of each factors based on their potential of having ground water. Sub-classes having higher potential get more rating and vice-versa.
GWPI is summation of product of weight and rating of each thematic layers. The weighted index overlay technique to determine GWPI can be expressed mathematically as:

where, ‘W’ represents the weight of individual layer (i),
‘R’ the rating of individual layer (i),
‘n’ represents total number of thematic layers.
3. Validation of GWPI map
The GWPI map produced can be compared with water column map generated tube-wells. Other ground data assembled during drilling, and geophysical survey can also be considered for validation of result. Again, the water level fluctuates for monsoon and other periods so field data collection from tube wells should consider seasonality. VES studies the resistivity or conductivity of sub-surface materials whose data can also be applied for the purpose of validation.
– Sangay Gyeltshen
Author is researcher from Bhutan and this work was carried out during his Post Graduate studies in RS and GIS (2018-2019). He can be found at sangye89@gmail.com.